本站讯 近日,中国海洋大学信息科学与工程学部电子工程学院李光亮副教授受邀在人工智能、机器人领域顶级期刊Nature Machine Intelligence(《自然·机器智能》)发表题为“Embodied intelligence: Realizing full body control of humanoid robots”(具身智能:实现人形机器人全身控制)的论文。
具身智能的理念与图灵1950年提出的人工智能概念密切相关,被认为是实现通用人工智能的一种有效途径。具身智能通过将智能算法与机器人物理实体的感知、动作和环境相结合,通过与环境交互获得更自然、更智能地解决问题的行为模式。人形(类人)机器人有可能成为最终的通用实体机器人。然而,当前大多数人形机器人设计都涉及集中式控制方法或聚焦于部分功能实现,使用传统机器人控制工程方法来控制所有肢体和关节的运动。由于缺乏适应性且效率较低,这种方法难以在实践中应用。最近,机器学习方法加速了智能实体代理的设计,深度强化学习解决了模拟和物理机器人(如高质量四足机器人)的复杂电机控制问题。
李光亮课题组针对深度强化学习实现实体机器人控制进行了深入研究,主要聚焦于人机混合增强智能与机器人学习从仿真到现实迁移两个方向。人机混合智能方面,课题组最新相关研究成果被ICRA(2024a,2023a)、IROS(2024,2023)、Ocean Engineering(2024)录用发表;机器人学习从仿真到现实迁移方面,最新相关研究成果被Nature Machine Intelligence2022、ICRA(2024b,2023b)、IEEE Robotics and Automation Letters2024录用发表。其中,ICRA、IROS是全球规模最大、最具影响力的机器人顶级会议,Ocean Engineering是海洋工程领域顶级学术期刊。基于以上研究,课题组在Nature Machine Intelligence刊发的论文对实现人形机器人控制进行了调研,认为最近发表于Science Robotics的两篇论文在深度强化学习实现人形机器人全身控制方面取得了突破,证明了人形机器人学习适应性技能并与环境灵活互动的可能性。课题组进一步提出从仿真到现实迁移是实现人形机器人全身控制的重要一环,并指出大模型的融入可以使基于深度强化学习的人形机器人控制扩展到复杂情形下的行为学习,甚至涌现出新的未曾设计过的行为模式(图1)。
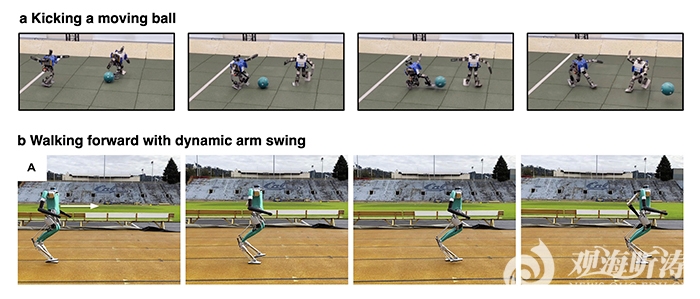
图1 人形机器人全身控制涌现行为模式
李光亮副教授为论文第一作者和唯一通讯作者,合作者包括Honda Research Institute Japan首席科学家Randy Gomez,中国海洋大学为第一作者单位和通讯作者单位。

李光亮副教授(前排左三)
李光亮课题组专注于基于深度强化学习的机器人学习与控制研究,近年来在人机混合增强智能、仿真到现实迁移强化学习、多智能体强化学习等领域取得了系列研究成果,对国内外相关领域研究产生了重要影响。相关研究工作获得国家自然科学基金、山东省泰山学者青年专家项目、青岛市自然科学基金与Honda Research Institute Japan资助。
通讯员:徐君岭
文章链接:https://www.nature.com/articles/s42256-024-00891-x
编辑:赵奚赟
责任编辑:刘莅